AUTONOMOUSUNDERWATERVEHICLES.
We design, build, and deploy autonomous underwater systems. Competing annually at RoboSub, pushing the boundaries of underwater robotics since 2005.
LON: 118.2857° W
Dive Into Underwater Robotics.
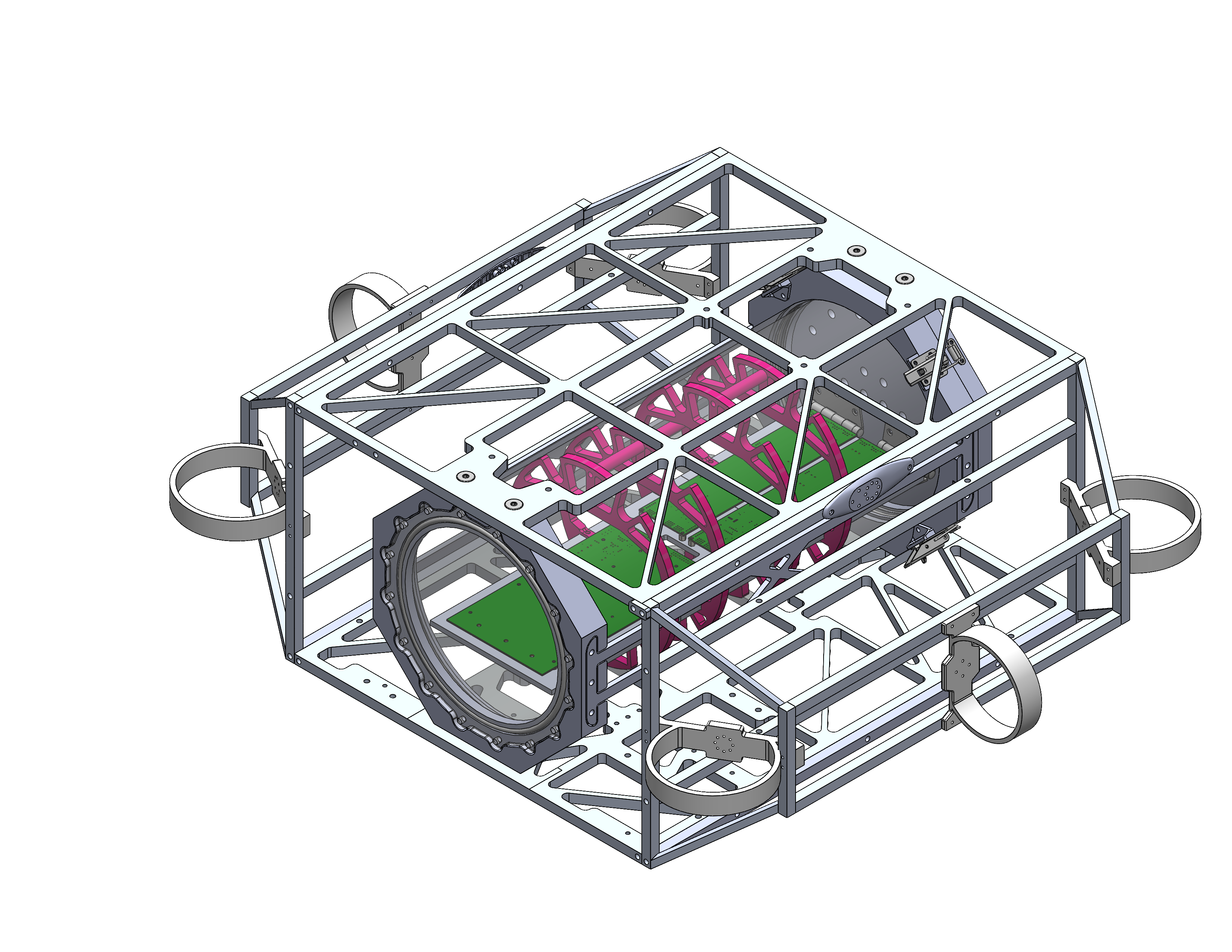
USC RoboSub is a student-led organization pushing the boundaries of underwater robotics. Combining the expertise of our Software, Electrical, & Mechanical teams, we design & build autonomous underwater vehicles (AUVs) and compete in the annual RoboSub competition, where we showcase our dedication to excellence in engineering and innovation.
Industry-Standard Tools
Mechanical
SOLIDWORKS
3D CAD software for mechanical design & simulation
Software
ROS
Industry-standard robotics middleware for distributed computing & sensor integration
DevOps
DOCKER
Containerization for consistent development & deployment environments
Electrical
ALTIUM
Professional PCB design & electronic schematic software
Ready to Dive In?
No experience required. Just passion, dedication, and a willingness to learn.